Projet étudiant
Dans le cadre d’un projet d’une futur Startup désirant explorer cette technologique, un projet d’hélice holographique a été réalisé par des étudiants de 3° année. L’objectif restait d’acquérir un savoir-faire sur ce type de technologie.
Qu’est-ce qu’une hélice holographique ?
Une hélice holographique est équipée de diodes LEDs disposées sur ses pâles. En tournant, l’hélice disparaît aux yeux des spectateurs, comme le fait un ventilateur, tandis que les diodes s’allument et peuvent afficher une image animée ou non.
Les hélices holographiques vont mettre en jeu la notion de persistance rétinienne de l’œil humain. Le principe est assez simple en soi : c’est le phénomène optique qui attribue à l’œil une image rémanente que les cellules de la rétine gardent en mémoire pendant environ 1/18e de secondes. Après avoir fixé une image, la rétine enregistre ses couleurs et l’humain continue de la voir pendant environ 50 millisecondes. En superposant plusieurs images avec la bonne fréquence, la persistance rétinienne créait l’illusion d’une image 3D flottant dans l’air animée ou pas d’un mouvement.
L’hélice holographique effectue un mouvement de rotation à grande vitesse qui, combiné avec un affichage synchronisé des LEDs, donne à l’œil humain l’illusion d’une image qui flotte en l’air. Il s’agit bien d’une illusion, car en filmant une hélice holographique, on s’apercevra vite que le rendu n’est pas le même, la persistance du capteur de l’appareil n’étant en général pas la même que l’œil humain.
Le projet 3iL
Réalisé par des étudiants de dernière année, l’objectif était de découvrir et d’explorer cette technologie pour en acquérir les compétences. Pour cela, il a fallu concevoir entièrement un prototype d’hélice holographique, son système de rotation et bien sûr les programmes permettant l’affichage des LEDs en synchronisation avec leur rotation.
La conception d’un tel prototype n’est pas simple. Il a fallu faire de nombreuses recherches avant de démarrer pour affiner les choix technologiques.
Schéma électrique du prototype :
L’étude a permis ainsi de définir :
- l’utilisation d’un micro-ordinateur Raspberry PI 3 pour gérer les calculs et les traitements des images à afficher et une carte Arduino pour gérer l’affichage des Leds
- la source lumineuse en utilisant un bandeau à Leds
- une vitesse de rotation d’au moins 500 tours par minute pour permettre une résolution suffisante
- un moteur avec un couple suffisant : moteur électrique 12V à 3000tr/min et une vitesse de rotation ajustable
- l’alimentation électrique des Leds des pâles de l’hélice avec l’utilisation d’une bague collectrice pleine
- l’hélice conçue en bois léger
- l’alimentation de tous les éléments (Arduino, Raspberry PI, bandeaux de Led, capteur de présence)
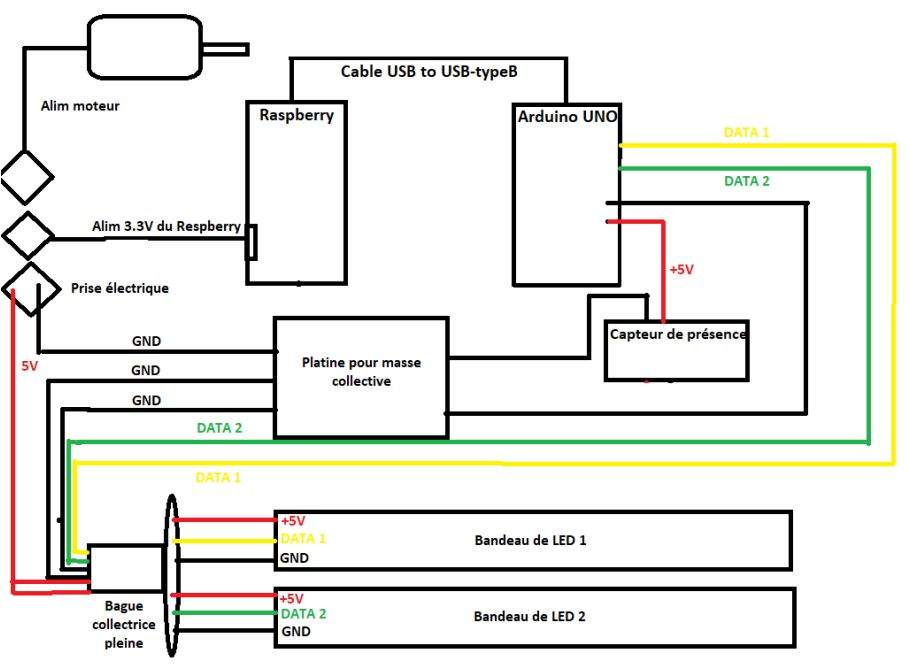
La problématique la plus complexe à résoudre a été de trouver le moyen de déterminer à chaque tour de l’hélice, la position (et donc l’instant) où doit commencer la séquence d’affichage. Pour cela un capteur de présence infrarouge KY-032 connecté à l’Arduino a été utilisé. Ainsi, dès que la pâle passe devant le capteur, une information est reçue par l’Arduino qui peut commencer une nouvelle séquence d’affichage.
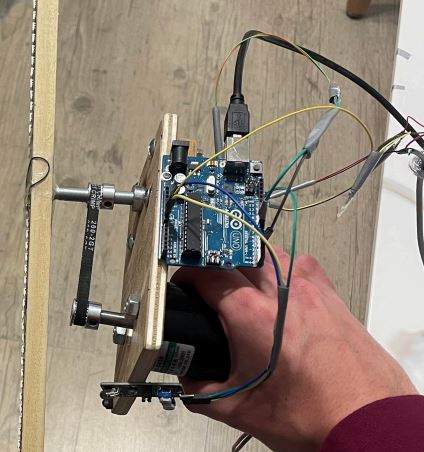
La solution utilise une planche en bois en guise de pâle afin de pouvoir avoir une surface plate pour coller les bandeaux de LEDs. Une pâle métallique a été testée mais a cassé l’arbre creux sur lequel elle était fixée.
Le Raspberry Pi est utilisé pour gérer une interface utilisateur et la communication avec l’Arduino, tandis que l’Arduino est utilisée pour contrôler les LEDs de l’hélice. Le Raspberry Pi exécute un mini serveur web qui permet via une interface web d’importer l’image à afficher. Un programme extrait les points de couleurs puis affiche la prévisualisation du rendu.
Le Raspberry Pi communique avec l’Arduino en utilisant la connexion USB pour envoyer les points de couleur et exécuter le script d’allumage des LEDs. C’est l’Arduino qui commande l’affichage des LEDs de l’hélice.
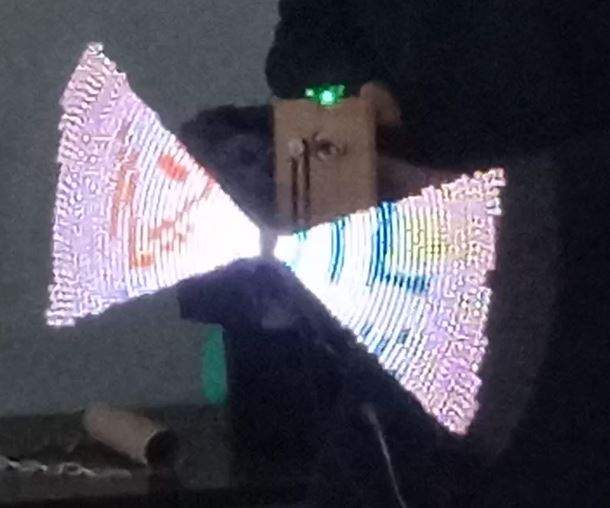
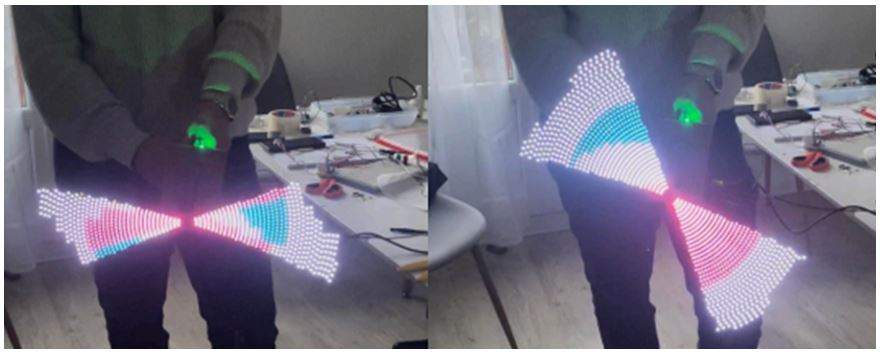
L’hélice holographique conçue est fonctionnelle avec un rendu d’image assez interéssant. Une vitesse plus importante, voire un plus grand nombre de LEDs, permettraient un affichage plus précis, mais le résultat reste trés correct.
Les images montrées ne sont pas de très bonne qualité car capturées par des téléphones portables. Pour capturer des images de l’hologramme complet, il est recommandé d’utiliser un appareil photo professionnel avec une sensibilité plus grande.
Quelques conseils et améliorations ont été mises en perspective comme l’utilisation d’n moteur à arbre creux pour éviter d’utiliser une courroie et en faisant passer les fils de la bague dans l’arbre du moteur, l’utilisation de micro-LED qui est préférable car plus rapprochées les unes des autres la résolution n’en serait que meilleure, et une vitesse plus importante voire la possibilité de mettre 4 pâles pour obtenir un rendu encore plus net.
B. Chervy (2023)