Dans le cadre de leur activité de Recherche les enseignants-chercheurs de l’école sont amenés à encadrer des doctorants. 3iL Ingénieurs s’engage d’ailleurs chaque année en participant au financement d’au moins une thèse.
Ronald Moussitou (2023-2026)
L’IA et l’enseignement des mathématiques : Comment l’intégration des systèmes d’IA affecte-t-elle le travail de l’enseignant ?
En matière d’enseignement des mathématiques, les enseignants font face à divers défis, notamment la participation des élèves sujets à l’ennui ou à la distraction, la motivation des élèves peu intéressés, la gestion de l’anxiété liée aux mathématiques, l’instillation d’une compréhension véritable chez les élèves passifs, l’offre d’occasions suffisantes d’exercice, l’évaluation des progrès dans un contexte où les réponses sont facilement accessibles, et la gestion des niveaux disparates de préparation des élèves. Cependant, étant donné que les enseignants ont souvent peu de temps à consacrer aux élèves, répondre à ces défis représente un défi en soi.
De nombreuses recherches sur l’intelligence artificielle (IA) en enseignement des mathématiques (AIME) suggèrent que l’utilisation de systèmes d’IA pourrait avoir un impact significatif pour les enseignants. Ainsi, la question centrale est de savoir comment intégrer de manière pertinente ces systèmes d’IA pour permettre aux enseignants de bénéficier de leurs impacts et les aider à relever ces défis. Une intégration réussie de ces systèmes d’IA pourrait-elle permettre d’identifier de manière précise les changements spécifiques dans le métier d’enseignant en mathématiques ?
Maxime Balloufaud (2022-2025)
Projet TERAPACE (TEléexercice par la Réalité Augmentée des Paralysies CErébrales) : Un exergame en Réalité Augmentée pour la rééducation cognitivo-motrice d’enfants et d’adolescents atteints de Paralysie Cérébrale (PC) ou de Lésions Cérébrales Acquises (LCA)

Les programmes de rééducation pour les enfants et adolescents atteints de PC ou de LCA ne sont pas facile d’accès, ce qui constitue une entrave au développement de leurs capacités physiques et cognitives. La pandémie de Covid-19 a mis en exergue le besoin de mener des actions de soins spécifiques auprès de ces enfants et de leur famille. Dans le cadre de la rééducation de ces enfants, il est nécessaire de proposer des programmes de rééducation cognitivo-moteurs ou de navigation spatiale en intégrant différents stimuli sensoriels (visuel, auditif). Dans ce contexte, les nouvelles technologies semblent être une solution pertinente pour proposer une rééducation ludique et personnalisée avec la possibilité d’effectuer de l’auto-rééducation à distance. La réalité virtuelle est couramment utilisée pour la rééducation pédiatrique, à l’inverse de la réalité augmentée qui est une technologie très récente et prometteuse. Avant d’étudier l’efficacité d’un nouveau programme à base de réalité augmentée, il est essentiel d’évaluer l’utilisabilité, l’expérience utilisateur, l’acceptation ou encore les potentiels bénéfices de ce type de dispositif dans la rééducation cognitivo-motrice de cette population.
Nous avons développé un exergame, grâce à un casque de réalité augmentée, permettant à terme, d’offrir une nouvelle forme de rééducation, à la fois ludique et interactive, pour les enfants et adolescents PC ou avec des LCA.
Ce projet repose sur trois objectifs opérationnels :
- Le premier objectif étant de concevoir et de développer un dispositif de réalité augmentée.
- Le second objectif est d’évaluer le niveau d’utilisabilité, d’expérience utilisateur, d’acceptation et de motivation associés au dispositif de réalité augmentée.
- Le troisième est d’étudier la faisabilité d’un déploiement à domicile auprès des patients et de leurs familles.
Gabriel Valenti (2022-2025)
Développement d'une plateforme de traitements de signaux radars pour détection haute résolution
Nous nous intéressons dans ces travaux à la surveillance et au suivi d’objets spatiaux en orbite terrestre basse. La surveillance des débris spatiaux est aujourd’hui une priorité pour les agences spatiales, en raison de la menace grave que représentent ces objets pour les satellites et les missions spatiales. La détection et la détermination de paramètres de cibles avec une grande précision dans un environnement bruité (échos indésirables, fouillis radar, interférences, etc.) restent délicat. Le développement d’algorithmes de traitement du signal associé aux techniques de l’intelligence artificielle permet de répondre à ces limitations. Dans cette thèse, nous proposons d’explorer l’apport des techniques de Machine Learning ou de Deep Learning aux problématiques du traitement et de l’analyse des signaux radar pour la détection haute résolution : estimation de paramètres et le suivi de cibles. Le défi majeur pour le développement de techniques l’intelligence artificielle pour les radars est la disponibilité des données d’apprentissages. Les objectifs de la thèse sont alors de :
- Développer un simulateur radar multi-antenne haute résolution pour l’application spatiale
- Mettre en œuvre une plateforme expérimentale pour le traitement des signaux radar
- Créer une base de données d’apprentissage à partir des données simulées et mesurées
- Mettre en œuvre les techniques de l’IA pour améliorer la détection et la résolution.
Michael Law San (2022-2025)
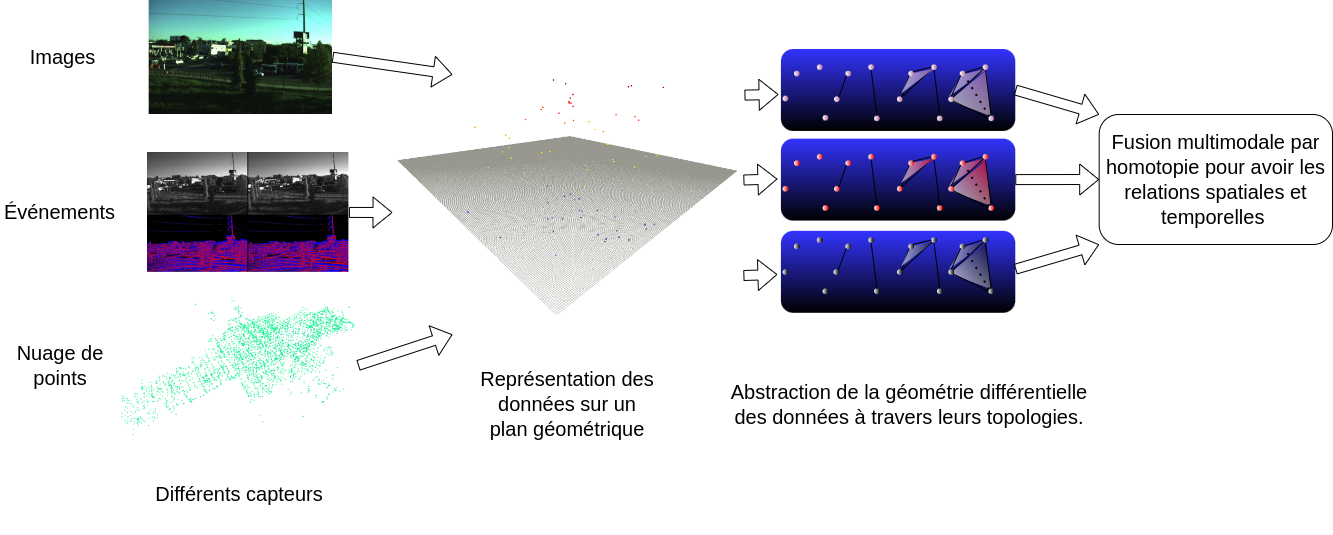
Perception et cartographie hybrides et distribuées pour des systèmes multirobots hétérogènes en environnements ouverts
Cette thèse a pour objectif l’étude et progresser l’état de l’art sur la fusion multimodale de la perception d’un système coopératif de robot hétérogène distribué. La fusion multimodale a pour objectif d’avoir une représentation unifiée à partir des différents capteurs des robots, mais aussi de faire usage de leur complémentarité. En contextualisant qu’avec tout système d’observation, il y aura des incohérences en termes spatiaux, temporels, mais aussi dus aux bruits intrinsèques aux capteurs. En ayant cette représentation unifiée, le système de robots hétérogène pourra s’auto-organiser afin d’accomplir des missions. Différentes méthodes de fusion multimodale seront étudiées, notamment celles dérivées de méthodes de l’algèbre topologique, mais aussi issues des méthodes d’apprentissage automatique.